



Quadcopter FX Simulator


คำอธิบายของQuadcopter FX Simulator
A Quadcopter / Multirotor RC Drone simulator with First Person View (FPV), HUD, Return Home, Course Lock, Home Lock, Camera Gimbal, Acro mode, Acro 3D mode and more..
Now Google Cardboard VR is also supported for immersive flying and FPV experience.
Support for Controllers
Please note that this a simulator and Not a game. It is designed for RC enthusiasts to practice Flying skills.
Basic Tutorial for beginner is in the above description video.
Minimum Screen resolution required is 800 x 480 px. Minimum Recommended RAM is 1 GB. We are open to suggestions and problems. You can always email us at our support email.
Features:
1) Based on real physics Model of Quadcopter
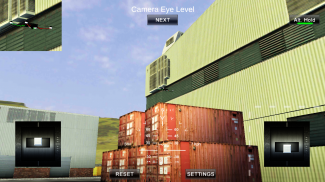
2) Interactive selection of different cameras modes:
* Eye level Camera
* First Person View Camera
* Stabilized Gimbal Camera
* Follow Camera
You can walk around while flying, looking at the quad either by dragging the middle of screen or by enabling accelerometer button on the left side in the Eye level Camera Mode..
3) Return to Location (RTL)
When on the Quad will automatically Return and Land back in its Landing Position. It will Automatically switch on when the Quad goes out of range.
4) Position Hold
When ON the Quad will try to Hold its position when both control sticks are released.
5) Course Lock
When ON the Forward, Backward, Left and Right will remain same regardless of orientation of Quad. e.g. Moving Right stick Forward will always make the Quad go forward in East Direction even if its pointing towards north.
6) Home Lock
When ON the Forward will always be Away from you and Backwards will always be towards you regardless of Quads Orientation.
7) Heads up Display(HUD)
Displaying real-time Pitch, Roll, Heading, Altitude and Speed.
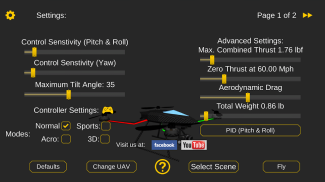
8) Adjustable Control sensitivity Settings
9) Auto Stabilizing adjustable
10) Altitude Hold Switch
If ON the quad will try to maintain the altitude when it was switched on.
11) Advanced Settings
If enabled users can change the Total Weight, Static / Dynamic thrust, PID setting and Aerodynamic Drag values.
12) Multiple Quad / Scene Selection / Some basic Challenges for Time Pass..
13) Multiple mode Input Support.
Now it supports mode1, mode2. mode3, mode4 and accelerometers. You can change via settings page
14) Camera rotation in FPV and Gimbal camera.
Click and Drag from center of screen on FPV or Gimbal camera. Double click in center to reset.
15) Dynamic Wind
Wind effect will reduce when behind the building.
16) Google cardboard Support for immersive virtual reality and FPV experience.
Make sure that you have a controller attached to the device because the only way you can control the quadcopter is by controller once the Cardboard VR is enabled. After enabling you have to gaze at the buttons on the UI and press the trigger button on the cardboard to click it. Once you are flying then pressing the trigger anywhere will open the settings page. You can also touch on screen anywhere to execute trigger event instead of pressing the trigger button.
17) Max Tilt Angle / Auto Stabilize Sensitivity Slider
In Normal Mode the slider changes the Maximum Tilt angle setting. This settings determines the maximum roll / pitch angle the quadcopter will tilt. In Sports Mode it changes the Auto Stabilize sensitivity. The higher the settings the more force is applied to stabilize the quadcopter.
18) Acro / Acro 3d mode for expert flying
Auto stabilize will not be applied in these modes. You need to be expert to fly in this mode.In 3D Mode is mode in which the Quadcopter can fly upside down also. The throttle sticks will produce reverse thrust when moved down from the center position.
Enjoy Flying..
Credits: Some Arteria content is in use.
</div> <div jsname="WJz9Hc" style="display:none">Quadcopter / Multirotor RC จำลองจมูกกับคนแรก View (FPV) ฮัดกลับหน้าแรก, สนามล็อคล็อคหน้ากล้อง Gimbal โหมด Acro โหมด Acro 3D และอื่น ๆ ..
ตอนนี้ Google กระดาษแข็ง VR ยังสนับสนุนสำหรับการบินดื่มด่ำและประสบการณ์ FPV
การสนับสนุนสำหรับตัวควบคุม
โปรดทราบว่านี้จำลองและเกมไม่ได้ มันถูกออกแบบมาสำหรับผู้ที่ชื่นชอบ RC ในการฝึกทักษะการบิน
การสอนขั้นพื้นฐานสำหรับการเริ่มต้นเป็นคำอธิบายในวิดีโอด้านบน
ความละเอียดหน้าจอที่จำเป็นขั้นต่ำเป็น 800 x 480 พิกเซล แนะนำ RAM ขั้นต่ำ 1 GB เราจะเปิดให้ข้อเสนอแนะและปัญหา คุณสามารถส่ง email มาที่อีเมลของเราสนับสนุน
คุณลักษณะเด่น:
1) จากฟิสิกส์จริงจำลอง Quadcopter
2) การเลือกแบบโต้ตอบของโหมดกล้องที่แตกต่างกัน
* กล้องระดับตา
* คนแรกดูกล้อง
* กล้อง Gimbal Stabilized
* กล้องตาม
คุณสามารถเดินไปรอบ ๆ ในขณะที่บินมองที่รูปสี่เหลี่ยมอย่างใดอย่างหนึ่งโดยการลากตรงกลางของหน้าจอหรือโดยการเปิดใช้ปุ่ม accelerometer ด้านซ้ายในโหมดกล้องระดับตา ..
3) กลับไปยังสถานที่ตั้ง (RTL)
เมื่ออยู่บนลานกว้างโดยอัตโนมัติจะกลับที่ดินและกลับมาอยู่ในตำแหน่งที่เชื่อมโยงไปถึงของ มันจะเปลี่ยนโดยอัตโนมัติเมื่อ Quad ออกไปจากช่วง
4) ตำแหน่งถือ
เมื่อบนลานจะพยายามที่จะดำรงตำแหน่งเมื่อทั้งแท่งควบคุมจะถูกปล่อยออก
5) หลักสูตรล็อค
เมื่อเปิดไปข้างหน้าไปข้างหลังซ้ายและขวาจะยังคงเหมือนเดิมโดยไม่คำนึงถึงการวางแนวของ Quad เช่น. ย้ายติดขวาไปข้างหน้าเสมอจะทำให้ Quad ก้าวไปข้างหน้าในทิศทางตะวันออกแม้ว่ามันชี้ไปทางทิศเหนือ
6) หน้าแรกล็อค
เมื่อเปิดไปข้างหน้าจะเป็นไปจากคุณและย้อนกลับจะเป็นต่อคุณโดยไม่คำนึงถึงการปฐมนิเทศคณะสี่คน
7) หัวขึ้นจอแสดงผล (HUD)
แสดงเรียลไทม์สนาม, Roll, หัวเรื่อง, ระดับความสูงและความเร็ว
8) การตั้งค่าความไวแสงที่สามารถปรับการควบคุม
9) ปรับอัตโนมัติเสถียรภาพ
10) ระดับความสูงถือสวิทช์
ถ้าบนรูปสี่เหลี่ยมจะพยายามที่จะรักษาระดับความสูงเมื่อมันถูกเปิด
11) การตั้งค่าขั้นสูง
หากผู้ใช้เปิดใช้งานสามารถเปลี่ยนน้ำหนักรวมคงที่ / การแทงแบบไดนามิกและการตั้งค่า PID Aerodynamic ค่าลาก
12) หลาย Quad / เลือกบรรยากาศ / บางความท้าทายขั้นพื้นฐานสำหรับเวลาที่ผ่าน ..
13) โหมดหลายสนับสนุนการป้อนข้อมูล
ตอนนี้ก็สนับสนุน MODE1, โหมด 2 mode3, mode4 และ accelerometers คุณสามารถเปลี่ยนการตั้งค่าผ่านทางหน้า
14) การหมุนกล้องใน FPV และกล้อง Gimbal
คลิกและลากจากกึ่งกลางของหน้าจอบน FPV หรือกล้อง Gimbal ดับเบิลคลิกในศูนย์ที่จะตั้งค่า
15) ลมแบบไดนามิก
ผลลมจะช่วยลดความเมื่อด้านหลังอาคาร
16) สนับสนุนกระดาษแข็ง Google สำหรับความเป็นจริงเสมือนดื่มด่ำและประสบการณ์ FPV
ตรวจสอบให้แน่ใจว่าคุณมีตัวควบคุมที่แนบมากับอุปกรณ์เพราะวิธีเดียวที่คุณสามารถควบคุม Quadcopter คือการควบคุมเมื่อกระดาษแข็ง VR ถูกเปิดใช้งาน หลังจากเปิดใช้คุณต้องจ้องมองที่ปุ่มบน UI และกดปุ่มทริกเกอร์บนกระดาษแข็งที่จะคลิกมัน เมื่อคุณจะบินแล้วกดเรียกทุกที่จะเปิดหน้าการตั้งค่า นอกจากนี้คุณยังสามารถสัมผัสบนหน้าจอใดก็ได้ที่จะดำเนินการจัดกิจกรรมที่ทริกเกอร์แทนการกดปุ่มเรียก
17) แม็กซ์มุมเอียง / ความมั่นคงความไวแสงอัตโนมัติเลื่อน
ในโหมดปกติเลื่อนการเปลี่ยนแปลงมุมเอียงสูงสุดการตั้งค่า การตั้งค่านี้จะกำหนดม้วนสูงสุด / มุมสนาม Quadcopter จะเอียง ในโหมดกีฬาจะเปลี่ยนอัตโนมัติปรับความไว การตั้งค่าที่สูงขึ้นแรงมากขึ้นถูกนำไปใช้ในการรักษาเสถียรภาพ Quadcopter
18) Acro / Acro โหมด 3 มิติสำหรับผู้เชี่ยวชาญด้านการบิน
รักษาเสถียรภาพอัตโนมัติจะไม่ถูกนำมาใช้ในโหมดนี้ คุณจำเป็นต้องเป็นผู้เชี่ยวชาญในการบินในครั้งนี้ mode.In โหมด 3D เป็นโหมดที่สามารถบิน Quadcopter คว่ำยัง แท่งเค้นจะผลิตแรงผลักดันย้อนกลับเมื่อย้ายลงมาจากตำแหน่งกลาง
เพลิดเพลินไปกับการบิน ..
สินเชื่อ: บางเนื้อหา Arteria มีการใช้งาน</div> <div class="show-more-end">
Quadcopter FX Simulator--เวอร์ชั่น1.75c
(23-08-2019)

Quadcopter FX Simulator - ข้อมูล APK
เวอร์ชั่น APK: 1.75cแพ็คเกจ: com.Creativeworld.QuadcopterFXเวอร์ชั่นล่าสุดของQuadcopter FX Simulator














แอปในประเภทเดียวกัน








